《中国经济周刊》记者 贾璇 | 北京报道
11月30日,探月工程嫦娥五号任务飞行控制团队,按计划实施嫦娥五号探测器着陆器和上升器组合体,与轨道器和返回器组合体分离。凌晨4时40分,在科技人员精确控制下,嫦娥五号探测器组合体顺利分离。
12月1日23时11分,嫦娥五号探测器成功着陆在月球正面西经51.8度、北纬43.1度附近的预选着陆区,并传回着陆影像图。
成功着陆后,着陆器在地面控制下,进行了太阳翼和定向天线展开等状态检查与设置工作,将正式开始持续约2天的月面工作,采集月球样品。
嫦娥五号是我国探月工程“绕落回”三期任务的收官之战,将实现我国首次月球无人采样返回。中国航天科技集团八院承担了长征五号助推器和嫦娥五号轨道器的研制任务。
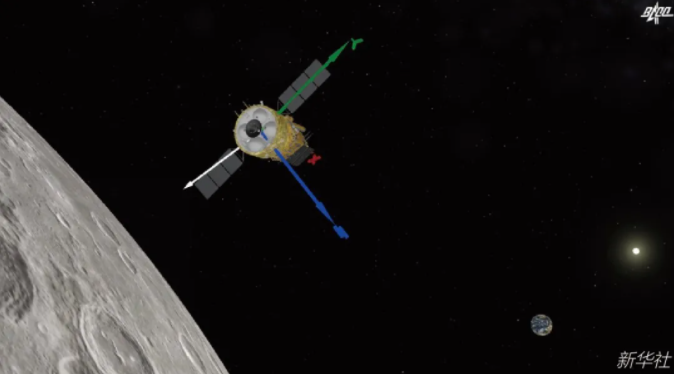
在本次任务的诸多看点之中,人类首次月球轨道无人自动交会对接和样品转移是最大的亮点之一,实现这个过程的核心是由中国航天科技集团八院(简称“八院”)研制的对接与样品转移机构。
《中国经济周刊》就此采访了八院相关人士。
世界首创的抱爪式对接机构
嫦娥五号将实现人类首次月球轨道无人自动交会对接和样品转移。虽同名“交会对接”,但嫦娥五号采用的对接方式与我们所熟悉的载人航天采用的对接方式却有很大的区别。
与近地轨道的任务不同,月球探测对探测器的质量和空间有严苛限制,嫦娥五号的对接机构必须做到小而精,其重量要减小到周边式对接机构的十五分之一,同时,还要具备样品容器捕获、自动转移功能,重量更轻、精度更高、过程更稳。
“抱爪机构具有重量轻、捕获可靠、结构简单、对接精度高等优点。因此,我们在嫦娥五号上采用了抱爪式对接机构,通过增加连杆棘爪式转移机构,实现了对接与自动转移功能的一体化,这些设计理念都是世界首创。”中国航天科技集团有限公司八院嫦娥五号探测器副总指挥张玉花介绍说。
“所谓的抱爪,其实形象地说,就像我们手握棍子的动作,两个方向一用力,就可以把棍子牢牢地握在手中。”嫦娥五号轨道器技术副总负责人胡震宇介绍。探测器采用的对接机构就是由3套K形抱爪构成的,当上升器靠近时,只要对准连接面上的3根连杆,将抱爪收紧,就可以实现两器的紧密连接。
1秒捕获、10秒锁紧
捕获、收拢、转移,看似简单的过程,但在38万公里之外高速运行的飞行器上实现却远远没有那么简单。
“月球轨道相对于地球轨道有时延,时间走廊较小,这就对时效性要求非常高,必须一气呵成完成对接与转移任务。”对接机构与样品转移分系统技术负责人刘仲解释,“对接全步骤要在21秒内完成,1秒捕获、10秒校正、10秒锁紧。为此我们做了35项故障预案,从启动开始到交会对接,全部采用自动控制。”
嫦娥五号对接与样品转移机构的研制成功,为探月三期任务的实施奠定了坚实技术基础,同时填补了我国在轻小型对接机构工程化研究领域的空白,将为后续深空探测等任务提供有力支撑。
责编 | 杨百会
(版权属《中国经济周刊》杂志社所有,任何媒体、网站或个人未经授权不得转载、摘编、链接、转贴或以其他方式使用。)
 夜间
夜间
 设置
设置
 移动端
移动端
 手机版
手机版
 顶部
顶部















